前者非常传统。发现车辆偏离车道,可能会发生碰撞。方向盘向相反方向校正,返回车道中央;后者为公共车道偏离添加了人性化的细分场景。
如果打开了自动驾驶仪,则系统会发现车辆在不打开转向灯的情况下改变了车道,并且驾驶员的手无法反复检查。一系列警告毫无结果。此时,系统认为驾驶员正在睡着,车辆将逐渐减速至24KM / H。同时,双闪光灯打开以通知以下车辆。
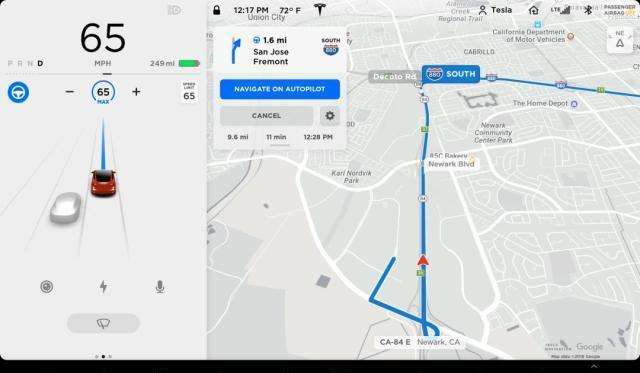
此外,我们还经历了内部测试中的自动辅助导航系统。简而言之,在设置导航后,在自动驾驶仪的高速路口添加自动上下坡道,并在遇到慢车时自动打开转向信号灯并更改车道以超车。
经过测试,是可行的。主要问题是在下车之前改变车道。将Model 3设置为在距十字路口2公里处更改为最右边的车道。没有汽车时,它自然会平稳行驶。
一旦遇到交通,坡道就在前方,但右侧无法更改。该系统很纠结。我不得不放慢脚步,等待路况通行,但是后面的车辆却没有达成一致,并不断击败号角。
最后,我别无选择,只能由我自己接管。有时,当我们下高速公路时,我们通常会根据实时路况做出决定。如果我们无法在2公里处行驶,我们将立即加速到1.5公里,1公里甚至仅500米处。
模型3的当前系统无法灵活地应对复杂的路况。也许有一天,当收集到足够的数据时,该系统的OTA将变得更加成熟。
如果打开了自动驾驶仪,则系统会发现车辆在不打开转向灯的情况下改变了车道,并且驾驶员的手无法反复检查。一系列警告毫无结果。此时,系统认为驾驶员正在睡着,车辆将逐渐减速至24KM / H。同时,双闪光灯打开以通知以下车辆。
此外,我们还经历了内部测试中的自动辅助导航系统。简而言之,在设置导航后,在自动驾驶仪的高速路口添加自动上下坡道,并在遇到慢车时自动打开转向信号灯并更改车道以超车。
经过测试,是可行的。主要问题是在下车之前改变车道。将Model 3设置为在距十字路口2公里处更改为最右边的车道。没有汽车时,它自然会平稳行驶。
一旦遇到交通,坡道就在前方,但右侧无法更改。该系统很纠结。我不得不放慢脚步,等待路况通行,但是后面的车辆却没有达成一致,并不断击败号角。
最后,我别无选择,只能由我自己接管。有时,当我们下高速公路时,我们通常会根据实时路况做出决定。如果我们无法在2公里处行驶,我们将立即加速到1.5公里,1公里甚至仅500米处。
模型3的当前系统无法灵活地应对复杂的路况。也许有一天,当收集到足够的数据时,该系统的OTA将变得更加成熟。
说的不错赞一下!()






